



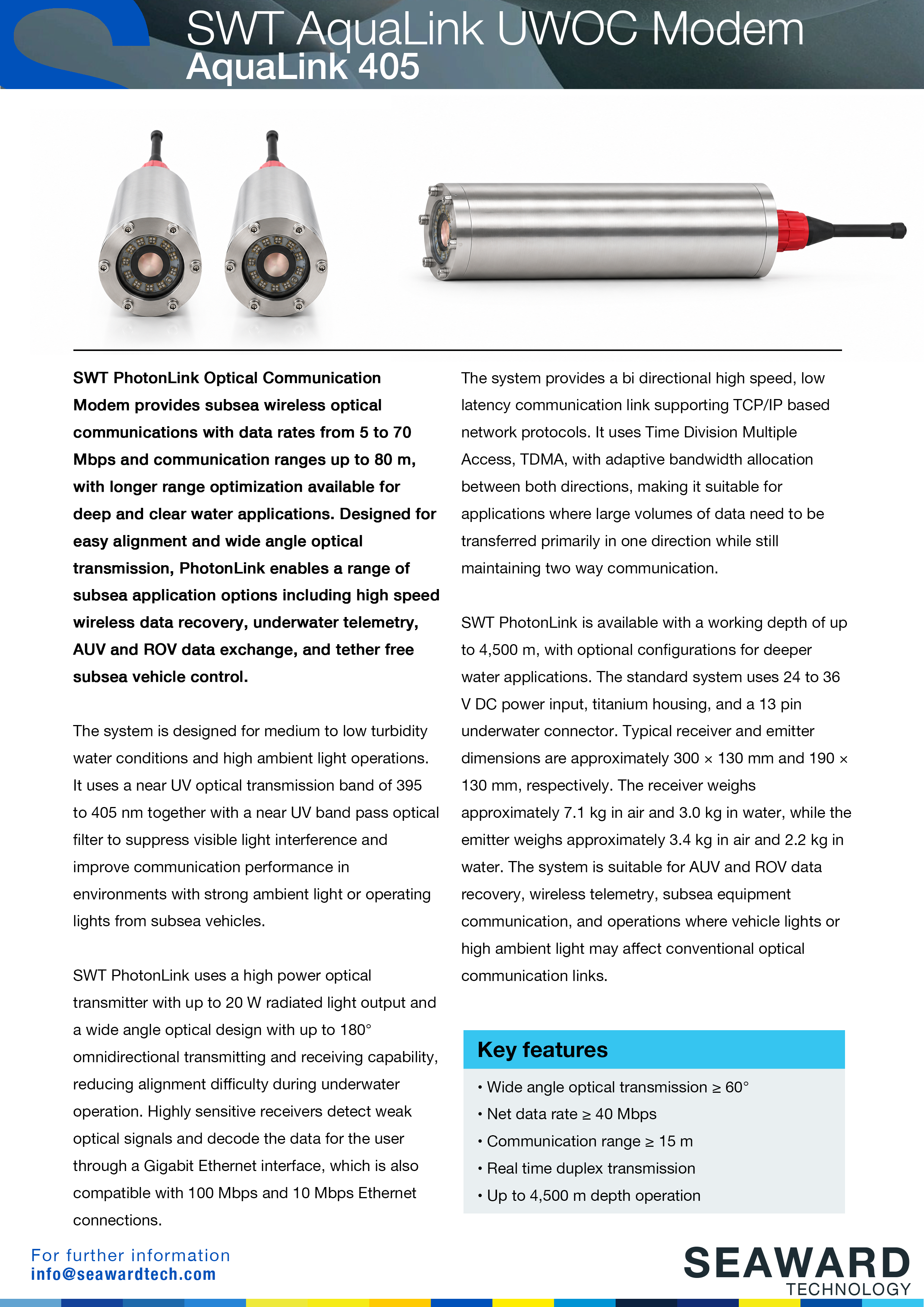
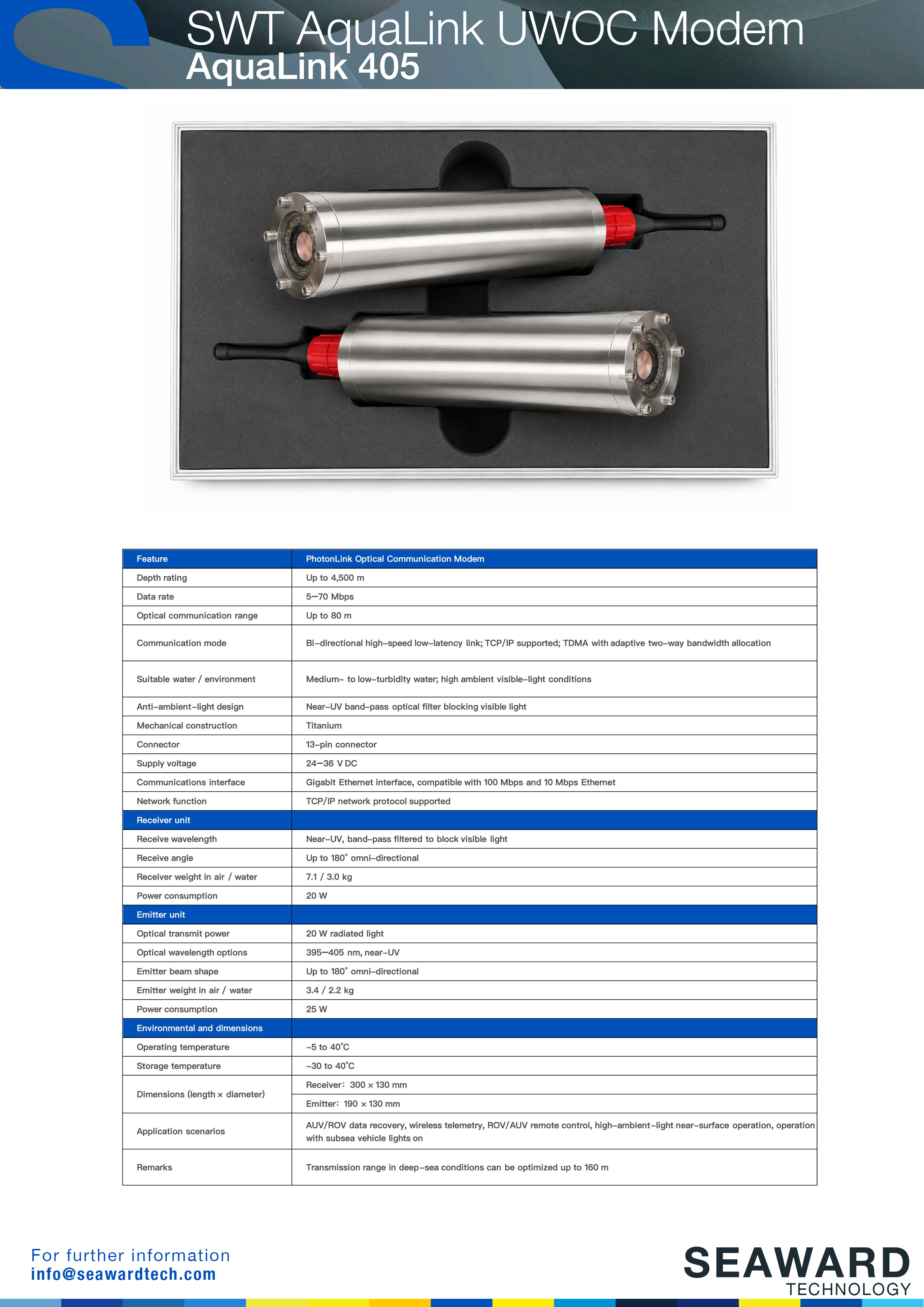
โมเด็มการสื่อสารด้วยแสง SWT PhotonLink เป็นระบบการสื่อสารด้วยแสงใต้ทะเลที่มีมุมมองกว้างและจัดแนวได้ง่าย โดยออกแบบมาเพื่อการถ่ายโอนข้อมูลแบบไร้สายความเร็วสูง การสื่อสารสองทางที่มีความหน่วงต่ำ (low latency) และการใช้งานที่เชื่อถือได้ในสภาพแวดล้อมใต้น้ำที่มีแสงแวดล้อมรุนแรง
การสื่อสารใต้น้ำเป็นหนึ่งในความท้าทายหลักของการปฏิบัติงานใต้ทะเลเสมอมา ระบบสื่อสารด้วยคลื่นเสียงสามารถให้การเชื่อมต่อระยะไกลได้ แต่มักถูกจำกัดด้วยแบนด์วิดธ์ต่ำและเวลาแฝงสูง ในขณะที่ระบบสื่อสารผ่านสายเคเบิลให้การถ่ายโอนข้อมูลความเร็วสูงอย่างมีเสถียรภาพ แต่สายเคเบิลอาจจำกัดการเคลื่อนที่ของยานพาหนะ เพิ่มความซับซ้อนในการติดตั้ง และก่อให้เกิดความเสี่ยงในการปฏิบัติงานเพิ่มเติม
เมื่อยานพาหนะใต้น้ำแบบไม่มีคนควบคุม (AUVs) ยานพาหนะใต้น้ำแบบควบคุมจากระยะไกล (ROVs) สถานีสังเกตการณ์พื้นทะเล และเครือข่ายเซนเซอร์ใต้ทะเลมีการใช้งานอย่างแพร่หลายมากขึ้น จึงเกิดความต้องการที่เพิ่มขึ้นสำหรับโซลูชันการสื่อสารไร้สายใต้น้ำที่มีความเร็วสูงกว่า เวลาแฝงต่ำกว่า และติดตั้งได้ง่ายกว่า
โมเด็ม AquaLink UWOC ได้รับการออกแบบมาเพื่อตอบสนองความต้องการนี้ โดยอาศัยเทคโนโลยีการสื่อสารด้วยแสงไร้สายใต้น้ำ AquaLink ให้การเชื่อมต่อข้อมูลแบบสองทิศทางที่มีความเร็วสูงและแบบเรียลไทม์สำหรับอุปกรณ์ใต้น้ำ ซึ่งเหมาะสำหรับการใช้งานต่าง ๆ เช่น การกู้คืนข้อมูลใต้น้ำ การส่งสัญญาณระยะไกลแบบไร้สาย การสื่อสารกับยานพาหนะใต้น้ำควบคุมจากระยะไกล (ROV) หรือยานพาหนะใต้น้ำไร้คนขับ (AUV) และการเชื่อมต่อเซ็นเซอร์ใต้น้ำ
เมื่อเปรียบเทียบกับการสื่อสารด้วยคลื่นเสียง การสื่อสารด้วยแสงใต้น้ำให้แบนด์วิดธ์ที่สูงกว่ามากและมีความหน่วงต่ำกว่าอย่างมีนัยสำคัญ อย่างไรก็ตาม ระบบการสื่อสารด้วยแสงแบบดั้งเดิมมักต้องการการจัดแนวที่แม่นยำระหว่างตัวส่งสัญญาณและตัวรับสัญญาณ
AquaLink ได้รับการออกแบบด้วย โครงสร้างการส่งผ่านแสงแบบมุมกว้าง โดยมีมุมลำแสงเท่ากับ ≥ 60° ซึ่งช่วยลดความยากลำบากในการจัดแนวระหว่างการปฏิบัติงานใต้น้ำ และทำให้การสร้างและรักษาการเชื่อมต่อแสงที่มั่นคงระหว่างอุปกรณ์ใต้น้ำเป็นไปได้ง่ายยิ่งขึ้น
สำหรับแพลตฟอร์มแบบเคลื่อนที่ เช่น ROV และ AUV รวมถึงอุปกรณ์ใต้น้ำแบบกึ่งคงที่ การออกแบบแบบมุมกว้างนี้สามารถเพิ่มความยืดหยุ่นในการปฏิบัติงานและลดความจำเป็นในการจัดวางตำแหน่งอย่างแม่นยำ
AquaLink รองรับอัตราการส่งข้อมูลสุทธิที่ ≥ 40 Mbps ซึ่งช่วยให้สามารถถ่ายโอนข้อมูลจากเซนเซอร์ ข้อมูลภาพ บันทึกภารกิจ และชุดข้อมูลขนาดใหญ่อื่นๆ ได้อย่างรวดเร็ว ในสถานการณ์การสื่อสารใต้น้ำระยะสั้นถึงระยะกลาง การสื่อสารแบบแสงสามารถเพิ่มประสิทธิภาพในการกู้คืนข้อมูลได้อย่างมาก เมื่อเทียบกับระบบเสียงความกว้างแถบต่ำแบบเดิม
ตัวอย่างเช่น หลังจาก AUV ดำเนินภารกิจสำรวจเสร็จสิ้น AquaLink สามารถใช้สร้างลิงก์แสงไร้สายกับสถานีใต้น้ำหรือ ROV ซึ่งจะทำให้สามารถถ่ายโอนข้อมูลความเร็วสูงได้โดยไม่จำเป็นต้องดึงยานกลับขึ้นมาทั้งหมด
AquaLink รองรับ การส่งสัญญาณแบบสองทางแบบเรียลไทม์ โดยมีการส่งข้อมูลแบบทางเดียวเป็นตัวเลือกเสริม ซึ่งช่วยให้ระบบสามารถรองรับทั้งการดาวน์โหลดข้อมูลความเร็วสูงและการสื่อสารสองทางสำหรับคำสั่งควบคุม การแจ้งสถานะย้อนกลับ และการตรวจสอบระบบ
ความสามารถนี้มีประโยชน์ต่อการปฏิบัติงานของ ROV/ AUV การทดสอบอุปกรณ์ใต้ทะเล เครือข่ายเซนเซอร์พื้นทะเล และแอปพลิเคชันการส่งสัญญาณข้อมูลใต้น้ำ ซึ่งต้องการการแลกเปลี่ยนข้อมูลสองทางที่มีความหน่วงต่ำ
AquaLink ติดตั้งด้วย อินเทอร์เฟซ Gigabit Ethernet ในขณะที่ยังคงรองรับการเชื่อมต่อ Ethernet ที่ความเร็ว 100 Mbps และ 10 Mbps ทำให้สามารถผสานรวมเข้ากับแพลตฟอร์มใต้ทะเลที่มีอยู่ ระบบควบคุม อุปกรณ์เก็บรวบรวมข้อมูล และอุปกรณ์อิเล็กทรอนิกส์บนเรือได้อย่างสะดวกยิ่งขึ้น
การใช้อินเทอร์เฟซ Ethernet มาตรฐานช่วยลดความซับซ้อนในการผสานรวม และทำให้ AquaLink สามารถเชื่อมต่อกับ ROV, AUV, โมดูลเซนเซอร์, เครื่องบันทึกข้อมูล (data loggers) และระบบควบคุมบนเรือ (topside control systems) ได้
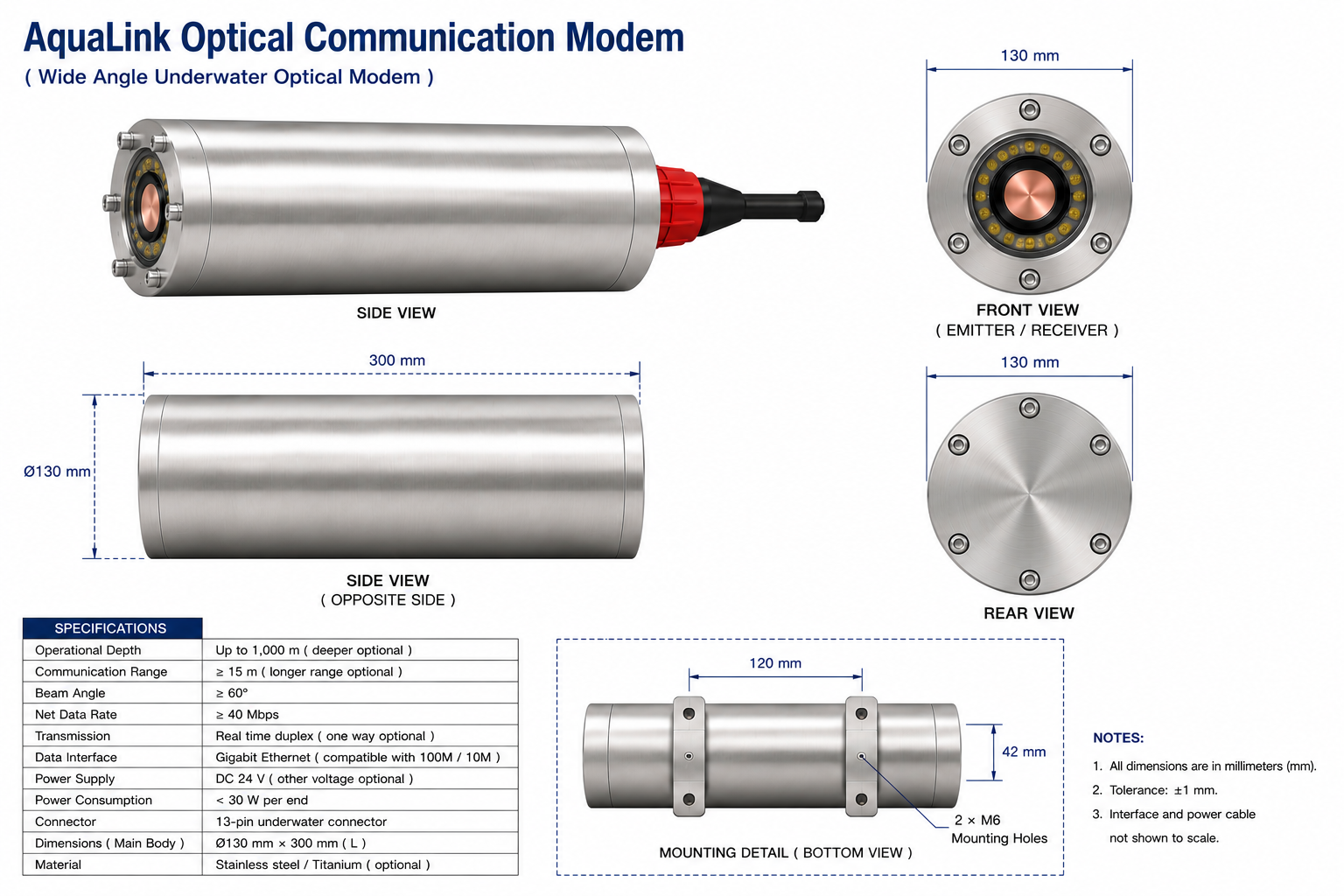
AquaLink มีการออกแบบทรงกระบอกที่กะทัดรัด โดยมีขนาดส่วนหลักประมาณ ø130 มม. × 300 มม. เหมาะสำหรับการติดตั้งบนแพลตฟอร์มใต้น้ำหลากหลายประเภท
ระบบทำงานด้วย แหล่งจ่ายไฟแบบ DC 24 V โดยมีตัวเลือกแรงดันอื่นๆ ให้เลือกใช้ได้ กำลังไฟฟ้าที่ใช้ที่ปลายเดียวของระบบคือ < 30 วัตต์ ซึ่งช่วยลดความต้องการพลังงานรวมของระบบใต้น้ำ โดยเฉพาะสำหรับแพลตฟอร์มที่ใช้แบตเตอรี่ เช่น ยานพาหนะใต้น้ำแบบไม่มีคนควบคุม (AUVs) และสถานีสังเกตการณ์ใต้น้ำระยะยาว
การกำหนดค่ามาตรฐานรองรับการทำงานที่ความลึกสูงสุดถึง 1,000 เมตร โดยมีเวอร์ชันเพิ่มเติมที่รองรับความลึกมากกว่านี้เป็นตัวเลือกเสริม ระบบยังใช้ขั้วต่อใต้น้ำแบบ 13 ขา สำหรับการผสานรวมใต้ทะเล
• การส่งผ่านแสงมุมกว้าง ≥ 60°
• อัตราการรับส่งข้อมูลสุทธิ ≥ 40 Mbps
• ระยะการสื่อสาร ≥ 15 เมตร
• การส่งผ่านแบบสองทางแบบเรียลไทม์
• อินเทอร์เฟซ Ethernet ความเร็วระดับกิกะบิต
• ใช้งานได้ลึกสูงสุดถึง 1,000 เมตร
• ออกแบบให้มีขนาดกะทัดรัดและใช้พลังงานต่ำ
• ขั้วต่อใต้น้ำแบบ 13 ขา
การกู้คืนข้อมูลจากยานพาหนะใต้น้ำอัตโนมัติ (AUV)
AquaLink สามารถใช้สำหรับการดาวน์โหลดข้อมูลแบบไร้สายความเร็วสูงหลังภารกิจของยานใต้น้ำแบบไม่มีคนควบคุม (AUV) ซึ่งช่วยลดความจำเป็นในการกู้คืนยานบ่อยครั้ง
การสื่อสารและการควบคุมยานใต้น้ำแบบมีสาย (ROV)
โมเด็มสามารถรองรับการแลกเปลี่ยนข้อมูลความเร็วสูงในระยะสั้น การสื่อสารเสริม และการควบคุมแบบไร้สายในพื้นที่ระหว่างปฏิบัติการยานใต้น้ำแบบมีสาย (ROV)
เครือข่ายเซนเซอร์พื้นทะเล
สำหรับเซนเซอร์พื้นทะเล หอดูดาวใต้น้ำ และระบบบันทึกข้อมูล AquaLink ให้วิธีการที่เหมาะสมสำหรับการดึงข้อมูลแบบไร้สายอย่างรวดเร็ว
การส่งสัญญาณสถานะอุปกรณ์ใต้ทะเล
ระหว่างการทดสอบ การตรวจรับรอง และการปฏิบัติงานทางวิศวกรรมใต้น้ำ AquaLink สามารถใช้สำหรับการตรวจสอบสถานะแบบเรียลไทม์ การส่งพารามิเตอร์ และการตอบกลับข้อมูล
อนาคตของการปฏิบัติงานใต้ทะเลกำลังมุ่งสู่ความเป็นอิสระมากขึ้น ปริมาณข้อมูลที่สูงขึ้น และโครงข่ายใต้น้ำที่ยืดหยุ่นยิ่งขึ้น การสื่อสารแบบไร้สายความเร็วสูงและหน่วงเวลาต่ำจะกลายเป็นเทคโนโลยีที่สำคัญในการขับเคลื่อนระบบที่อยู่ใต้น้ำรุ่นถัดไป
ด้วยการออกแบบเลนส์มุมกว้าง ความเร็วในการรับส่งข้อมูลสูง การสื่อสารแบบสองทางแบบเรียลไทม์ และอินเทอร์เฟซอีเธอร์เน็ตมาตรฐาน โมเด็ม AquaLink UWOC ให้โซลูชันที่ใช้งานได้จริงและยืดหยุ่นสำหรับการเชื่อมต่อใต้น้ำแบบไร้สาย
โมเด็ม AquaLink UWOC — การสื่อสารแสงไร้สายความเร็วสูงสำหรับการใช้งานใต้น้ำ
AquaLink 405