



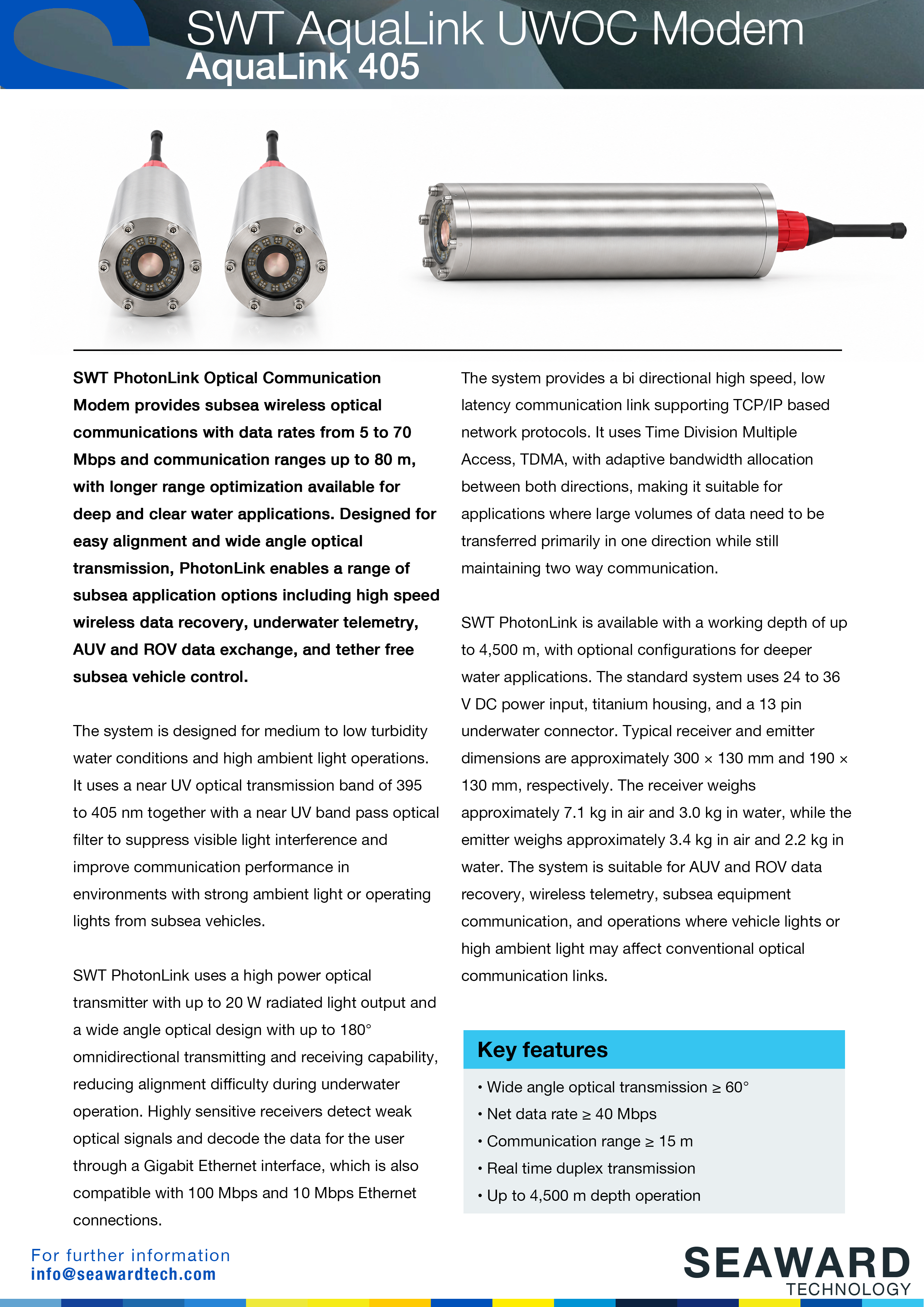
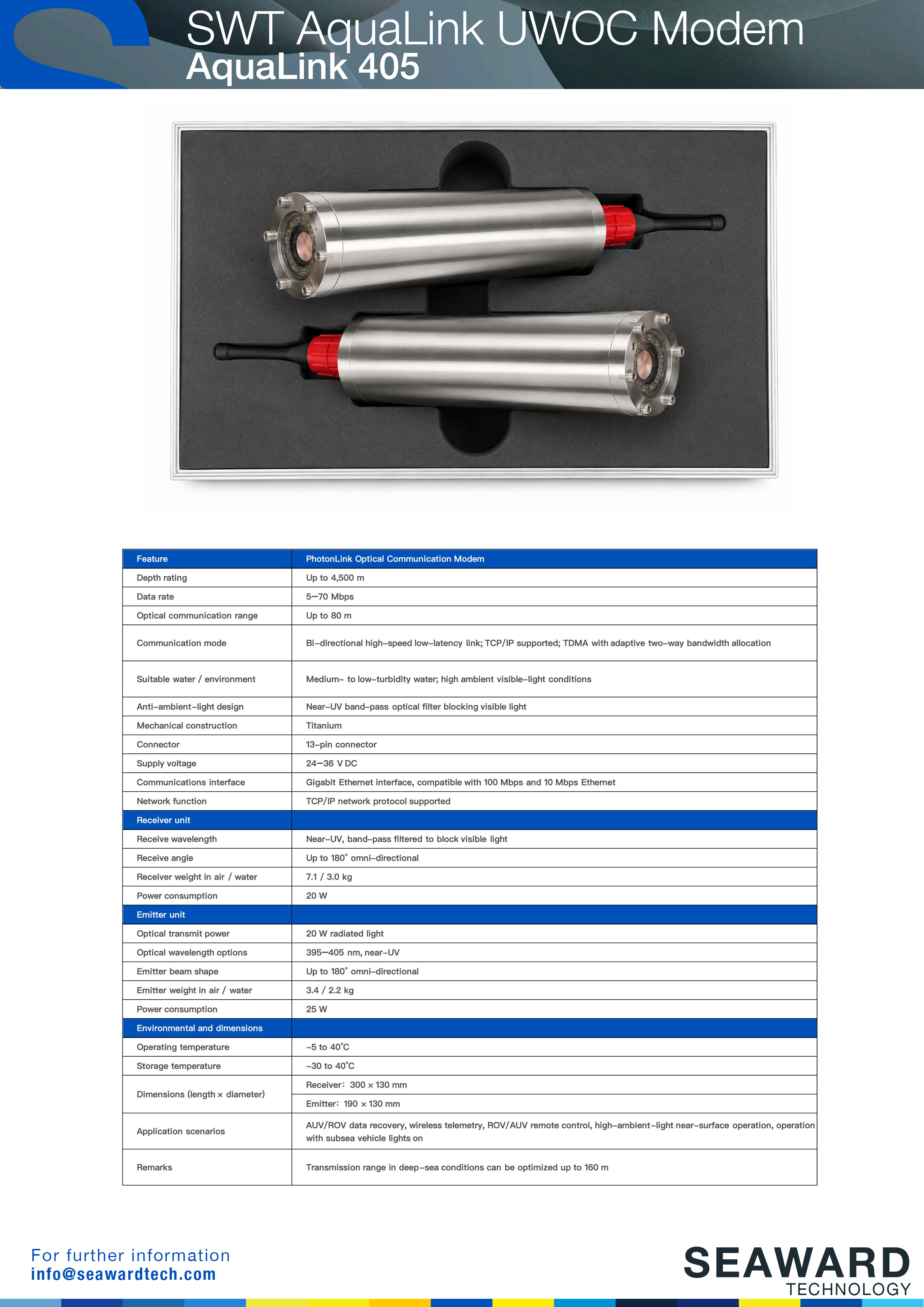
جهاز الاتصال البصري SWT PhotonLink هو نظام اتصال بصري تحت الماء ذي زاوية واسعة وسهولة في التوجيه، مصمم لنقل البيانات اللاسلكية عالي السرعة، والاتصال ثنائي الاتجاه منخفض الكمون، والتشغيل الموثوق به في البيئات تحت المائية ذات الإضاءة المحيطة العالية.
لطالما كانت الاتصالات تحت سطح الماء واحدةً من التحديات الرئيسية في العمليات البحرية العميقة. ويمكن أن توفر الاتصالات الصوتية اتصالاً على مسافات طويلة، لكنها غالبًا ما تكون محدودة بسبب عرض النطاق الترددي المنخفض والتأخير العالي. أما الاتصالات عبر الكابلات المربوطة فتوفر نقل بيانات مستقر وعالي السرعة، لكن الكابلات قد تقيّد حركة المركبات وتزيد من تعقيد عمليات النشر وتُحدث مخاطر تشغيلية إضافية.
وباتت المركبات الغاطسة ذاتية التحكم (AUVs) والمركبات الغاطسة التي يُدار تشغيلها عن بُعد (ROVs) ومحطات المراقبة القاعية والشبكات الاستشعارية البحرية العميقة تُستخدم على نطاق أوسع، ما أدى إلى تزايد الحاجة إلى حلول اتصال لاسلكي تحت الماء أسرع، وأقل تأخيرًا، وأسهل في النشر.
مودم أكوالينك يو ووك تم تصميمه لتلبية هذه الحاجة. ويُوفِّر نظام AquaLink، المستند إلى تقنية الاتصال الضوئي اللاسلكي تحت الماء، رابط بيانات ثنائي الاتجاه عالي السرعة وفي الوقت الفعلي لمعدات الغوص تحت سطح البحر. وهو مناسب للتطبيقات مثل استعادة البيانات تحت الماء، والقياس عن بُعد لاسلكي، واتصال المركبات التشغيلية عن بُعد (ROV) والمركبات ذاتية التحكم تحت الماء (AUV)، وربط أجهزة الاستشعار تحت سطح البحر.
وبالمقارنة مع الاتصال الصوتي، يوفِّر الاتصال الضوئي تحت الماء عرض نطاق ترددي أعلى بكثير وزمن انتقال أقل بشكل ملحوظ. ومع ذلك، فإن أنظمة الاتصال الضوئي التقليدية تتطلب في كثيرٍ من الأحيان محاذاة دقيقة بين جهاز الإرسال وجهاز الاستقبال.
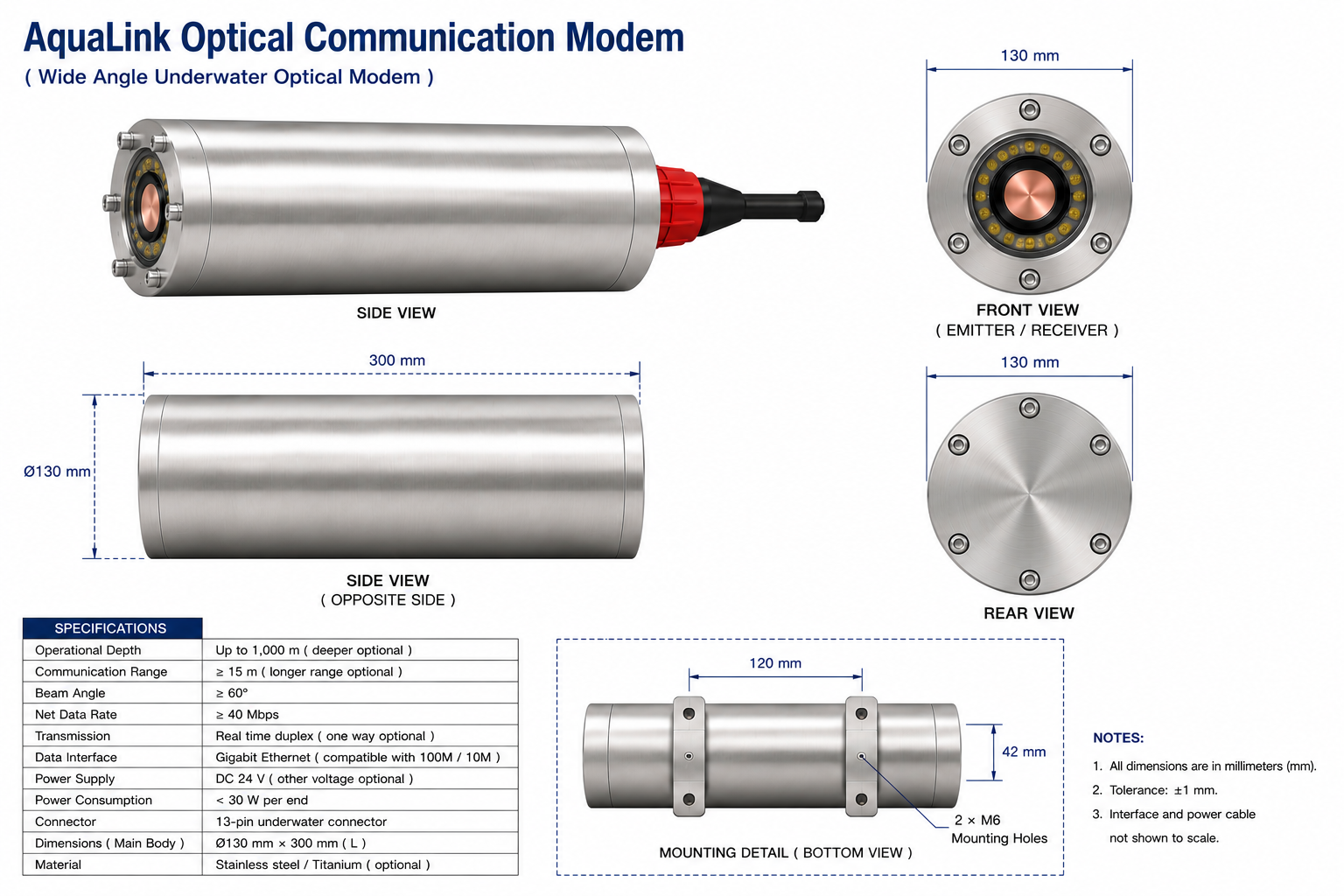
تم تصميم نظام AquaLink بـ هيكل انتقال ضوئي بزاوية واسعة ، وبزاوية شعاع تبلغ ≥ ٦٠° . وهذا يساعد في تقليل صعوبة المحاذاة أثناء العمليات تحت الماء، ويجعل من الأسهل إنشاء رابط ضوئي مستقر بين الأجهزة تحت سطح البحر والحفاظ عليه.
لهذه المنصات المتنقلة مثل المركبات تحت الماء التي تُدار عن بُعد (ROVs) والمركبات تحت الماء ذاتية التحكم (AUVs)، وكذلك الأجهزة تحت سطح البحر شبه الثابتة، يمكن أن يحسّن هذا التصميم الواسع الزاوية المرونة التشغيلية ويقلل الحاجة إلى تحديد المواقع بدقة.
يدعم نظام AquaLink معدل نقل بيانات صافٍ قدره ≥ 40 ميغابت في الثانية ، مما يمكّن من النقل السريع لبيانات أجهزة الاستشعار وبيانات الصور وسجلات المهام وغيرها من مجموعات البيانات الكبيرة. وبشكل موجز، في سيناريوهات الاتصال تحت سطح البحر على مدى قصير إلى متوسط، يمكن أن تحسّن أنظمة الاتصال الضوئي كفاءة استرجاع البيانات بشكل كبير مقارنةً بأنظمة الاتصال الصوتي التقليدية ذات العرض الترددي المنخفض.
فعلى سبيل المثال، بعد انتهاء مركبة AUV من مهمة مسح معينة، يمكن استخدام نظام AquaLink لإنشاء رابط ضوئي لاسلكي مع محطة تحت سطح البحر أو مركبة ROV، ما يسمح بنقل البيانات عالي السرعة دون الحاجة إلى استرجاع المركبة بالكامل.
يدعم نظام AquaLink الإرسال الثنائي الاتجاه في الوقت الفعلي مع إمكانية نقل البيانات في اتجاه واحد كخيار تكوين اختياري. ويسمح هذا النظام بدعم كلٍّ من تنزيل البيانات عالي السرعة والاتصال ثنائي الاتجاه لأغراض إرسال أوامر التحكم، وتغذية حالة التشغيل راجعةً، ومراقبة النظام.
وتُعد هذه القدرة مفيدةً لعمليات المركبات تحت الماء المُتحكَّم بها عن بُعد (ROV) والمركبات تحت الماء ذاتية التحكم (AUV)، واختبار المعدات تحت سطح البحر، وشبكات أجهزة الاستشعار على قاع البحر، وتطبيقات القياس عن بُعد تحت الماء التي تتطلب تبادل بيانات ثنائي الاتجاه منخفض زمن التأخير.
يأتي نظام AquaLink مزوَّدًا بـ واجهة إيثيرنت الجيجابت بينما يظل متوافقًا مع اتصالات إيثرنت بسرعات 100 ميغابت في الثانية و10 ميغابت في الثانية. وهذا يسهِّل دمجه مع المنصات تحت المائية الحالية وأنظمة التحكم ووحدات جمع البيانات والإلكترونيات المركَّبة على متن المنصات.
ويُسهم استخدام واجهة إيثرنت قياسية في خفض تعقيد عملية الدمج، ويسمح لنظام AquaLink بالاتصال بالمركبات تحت الماء المُتحكَّم بها عن بُعد (ROVs)، والمركبات تحت الماء ذاتية التحكم (AUVs)، ووحدات أجهزة الاستشعار، ومسجِّلات البيانات، وأنظمة التحكم السطحية.
يتميَّز نظام AquaLink بتصميم أسطوانيٍّ مدمج، بأبعاد جسمه الرئيسي تقريبًا: قطر ١٣٠ مم × ارتفاع ٣٠٠ مم وهو مناسب للتركيب على مجموعة واسعة من المنصات تحت الماء.
يعمل النظام بـ تيار مباشر 24 فولت ، مع توفر خيارات جهد أخرى. ويبلغ استهلاك الطاقة من الطرف الواحد للنظام < 30 واط ، مما يساعد في تقليل الطلب الكلي على الطاقة لأنظمة الغوص تحت الماء، لا سيماً في المنصات التي تعمل بالبطاريات مثل المركبات تحت المائية ذاتية التحكم (AUVs) والمحطات الرصدية تحت الماء طويلة الأمد.
تدعم التكوينة القياسية التشغيل على أعماق تصل إلى ١٠٠٠ متر ، مع توفر تكوينات للاستخدام في أعماق أكبر كإصدارات اختيارية. كما يستخدم النظام موصلًا تحت الماء ذا ١٣ دبوسًا للتكامل تحت سطح البحر.
• انتقال بصري بزاوية واسعة ≥ ٦٠°
• معدل نقل بيانات صافٍ ≥ ٤٠ ميغابت في الثانية
• مدى الاتصال ≥ ١٥ مترًا
• انتقال ثنائي الاتجاه في الوقت الفعلي
• واجهة إيثرنت جيجابت
• تشغيل على أعماق تصل إلى ١٠٠٠ متر
• تصميم مدمج منخفض الاستهلاك للطاقة
• موصل تحت الماء ذو ١٣ دبوسًا
استرجاع بيانات المركبة الغاطسة ذاتية التحكم (AUV)
يمكن استخدام نظام AquaLink لتنزيل البيانات لاسلكيًا وبسرعة عالية بعد مهمات المركبات الغاطسة ذاتية التحكم (AUV)، مما يقلل الحاجة إلى استرجاع المركبة بشكل متكرر.
اتصال وتحكم المركبات الغاطسة المُتحكَّم بها عن بُعد (ROV)
يمكن أن يدعم المودم تبادل البيانات لاسلكيًا لمسافات قصيرة وبسرعات عالية، والاتصال المساعد، والتحكم اللاسلكي المحلي أثناء عمليات المركبات الغاطسة المُتحكَّم بها عن بُعد (ROV).
شبكات أجهزة الاستشعار في قاع البحر
وبالنسبة لأجهزة استشعار قاع البحر، والمراصد تحت الماء، وأنظمة تسجيل البيانات، يوفِّر نظام AquaLink وسيلة عملية لاسترجاع البيانات لاسلكيًا وبسرعة.
البيانات الارشادية لمعدات ما تحت سطح البحر
أثناء الاختبارات تحت الماء، ومرحلة التشغيل الأولي، والعمليات الهندسية، يمكن استخدام نظام AquaLink لمراقبة الحالة في الوقت الفعلي، ونقل المعايير، وتغذية البيانات عكسياً.
مستقبل العمليات تحت سطح البحر يتجه نحو مزيد من الاستقلالية، وزيادة حجم البيانات، وشبكات تحت مائية أكثر مرونة. وسيصبح الاتصال اللاسلكي عالي السرعة ومنخفض زمن التأخير تكنولوجياً تمكينية هامة للأنظمة تحت المائية من الجيل القادم.
وبفضل تصميمها البصري الزاوي الواسع، ومعدل نقل البيانات العالي السرعة، والاتصال الثنائي الاتجاه الفوري، وواجهة الإيثرنت القياسية، مودم أكوالينك يو ووك توفر حلاً عمليًّا ومرنًا للاتصال تحت سطح البحر دون كابلات.
محول AquaLink UWOC — اتصال بصري لاسلكي عالي السرعة للتطبيقات تحت سطح البحر.
أكوالينك ٤٠٥