
海底インフラの安定性は、オフショアエネルギーと通信のすべての運用において不可欠です。海底の侵食は、パイプラインやケーブル、オフショア施設の健全性を脅かす大きな危険です。現代の安全基準では、手動調査や限定的なソナー探査が提供するものよりも高い可視性が要求されます。現代の遠隔操作型車両(ROV)ソナーや3Dイメージング技術は、これらの海底侵食検出方法を変革し、長期間にわたる運用および構造物の安全性を維持しています。

海底侵食の課題
自然の潮流や干潮の力に加え、浚渫や建設工事など人間の活動も海底侵食の原因となります。長期的な影響により、パイプラインが海底から露出し、基礎が不安定になり、危険な事故が発生する可能性があります。シングルビームソナー検出とダイバー調査は、海底侵食を監視する際に限られた可視性しか提供できません。これは、完全なパターン評価を提供できないためです。一部の企業が実施する定期的な調査では、これらのリスクを最小限に抑えることはできません。タイムリーで高解像度のデータがないため、対応が遅れ、結果的に企業にさらなる費用がかかることになります。
ROVソナー:高解像度の水中マッピング
現代のROV(遠隔操作車両)に搭載された高度なマルチビームソナー技術は、水中検査能力を大幅に向上させます。通常のソナー運用では、海底が取得された断面情報のみに限定されますが、ROVに設置されたソナーシステムは、センチメートル単位で侵食危険区域を特定できる精密な3D水深図を作成します。この装備は、人間のダイバーや引き回し式センサーが効果的に展開できない深い水域や強い流れの中でも良好に機能します。ROVの持つ連続的な海底スキャン能力により、エンジニアは堆積物の傾向を認識でき、インフラ損傷予防に関する予測を行うことができます。

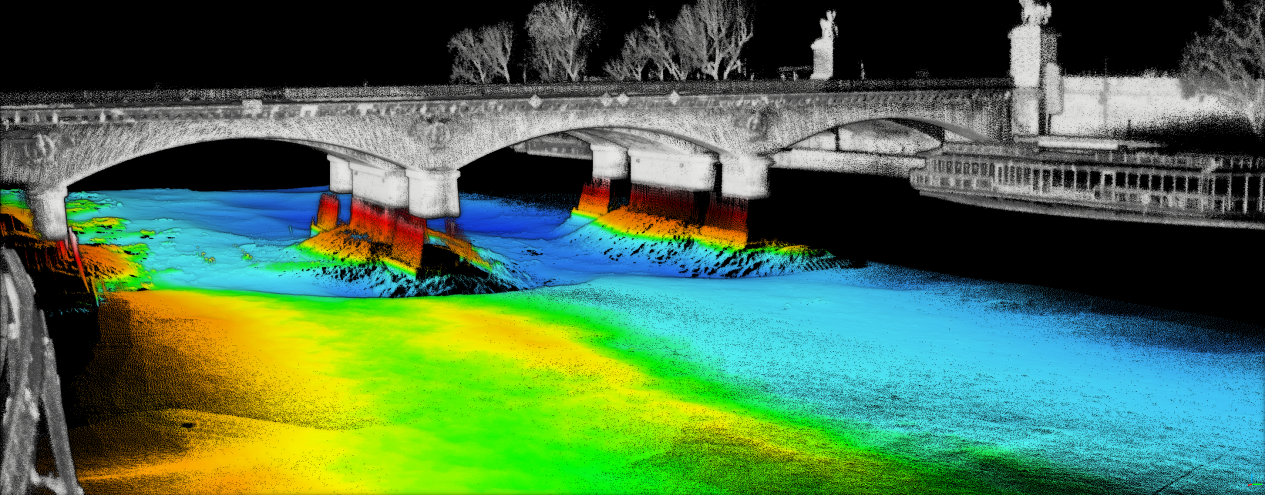
3Dイメージング:精度と予測分析の向上
次の検出アプローチは、3Dレーザーと写真測量イメージングを使用してソナー技術をサポートし、非常に正確な侵食発展の測定を提供します。現在、ROV(遠隔操作型潜水ロボット)には高解像度カメラとLiDARセンサーが搭載されており、これらは水中インフラやその周辺の堆積物分布の詳細な画像を提供します。アルゴリズムから生成される処理データは、水中地形の将来の変化を予測する動的モデルを生成します。この予測機能は、水中資産を管理する企業にとって非常に重要であり、緊急対応を行う代わりに積極的な予防措置を講じるのに役立ちます。
安全管理システムとの統合
広範なインフラ監視システムを通じて使用されるこれらの技術は、最大限のポテンシャルを発揮します。ROV検査活動で得られた運用データは、中央集約型の安全システムに情報を送信し、操縦士が生産を中断することなく海岸侵食の進行を監視し、維持管理を計画するのに役立ちます。現在、企業では自己実行型検出システムを使用して、国際的な海洋規制において定義された規制基準を超える侵食状況についてスタッフに通知しています。
海底インフラ保護の未来
ROVとイメージング技術の応用は、今後数年で水中インフラ保護市場で指数関数的に成長するでしょう。技術の進歩に伴い、AI搭載のAUVが侵食認識に使用され始め、運用中の人的存在を減らしながら、将来的にはより良い測定精度を提供します。海事産業の企業は、長期的な運用安全性および運用レジリエンスのために、elligent検出システムを必須要件として選択する必要があります。